
Sponsored by GAM.
Servo couplings, from bellows and elastomer varieties to distance and security varieties, join rotating elements whereas compensating for misalignment. (GAM.)
When engineers consider servo efficiency, the motor, drive and gearbox normally get a lot of the consideration. Nonetheless, the connection between these components additionally has a direct impact on how precisely movement is transmitted and the long-term well being of the system.
A coupling hyperlinks the shaft of a servo motor to a gearbox, a servo motor to the drive mechanism, or the gearbox to the drive mechanism. It transmits load from one element to the following whereas compensating for misalignment, permitting linked components to operate correctly with out breaking.
“The elements don’t usually join collectively naturally,” says Matt Ruggles, senior design engineer at GAM, a U.S.-based producer of servo gear reducers, servo couplings and different movement management elements. “Should you can’t make it good, make it adjustable.”
Shaft misalignment can introduce a number of issues right into a servo system. Noise and vibration are sometimes the primary indicators of elements preventing one another, resulting in inefficiency within the system. Misalignment additionally creates surprising hundreds on the bearings, inflicting untimely put on that may shorten the service lifetime of the motor, gearbox and surrounding elements.
Misalignment usually falls into three classes. Axial misalignment is motion out and in alongside the axis of rotation, generally attributable to temperature adjustments. Angular misalignment happens when the shafts sit at an angle to one another. Lateral misalignment occurs when the shafts are parallel however offset.
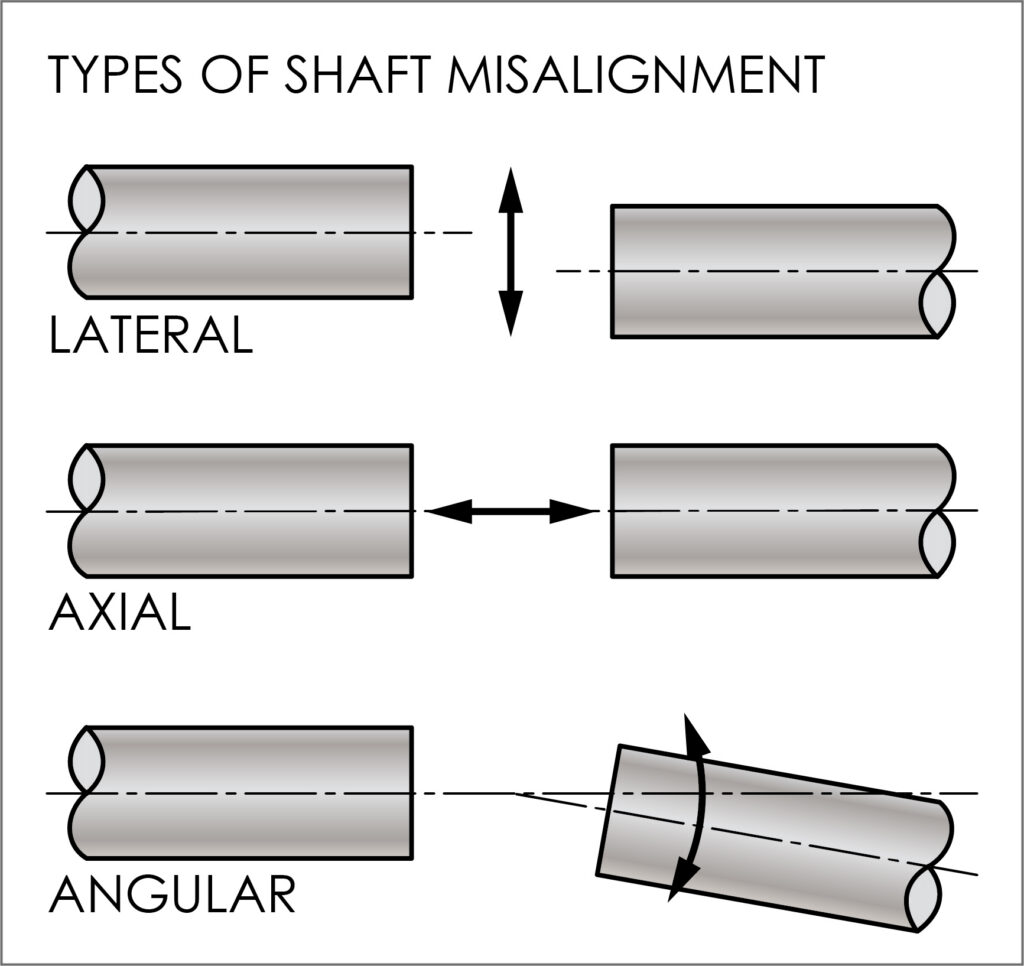
Axial, angular and lateral are the most typical forms of shaft misalignment. (GAM.)
“The quantity of misalignment that you could put by way of a coupling and have it final a very good period of time depends on what sort of coupling it’s,” says Ruggles. “There are as many forms of couplings as you possibly can title stars within the sky, and a few of them are purpose-built for particular forms of misalignment.”
For instance, the common joint in automobiles is designed particularly to deal with angular misalignment because the axle strikes up and down over bumps within the street, even over hundreds of miles. It’s all in regards to the coupling’s long-term alternating-stress limits; if the suitable limits are exceeded, the ensuing fatigue may cause the coupling to fail over time.
Whereas misalignment compensation helps shield element life, stiffness impacts how exactly movement is transmitted between elements. A coupling with increased torsional stiffness helps cut back backlash and misplaced movement, eliminating sponginess within the system.
“The stiffer the coupling is, the much less compliance there’s going to be in your system, which signifies that your movement system goes to be far more responsive and correct,” says Ruggles.
The trade-offs between misalignment tolerance and stiffness present up when evaluating GAM’s two primary servo coupling kinds: bellows and elastomer. Each are zero-backlash, low-inertia couplings designed to compensate for shaft misalignment, however they achieve this by way of completely different compensating components.
A bellows coupling makes use of stainless-steel bellows linked to the clamping hubs through a press match brass wire or a welded connection. This design offers it very excessive torsional stiffness whereas nonetheless permitting flexibility for misalignment, particularly angular misalignment. Consequently, it’s higher at sustaining precision and responsiveness, however is much less forgiving when alignment is off.
Bellows couplings additionally supply some tunability the place altering the variety of corrugations influences each stiffness and the way a lot misalignment the coupling can accommodate. They’re a robust match for quicker, higher-torque or cyclic-duty purposes, in addition to higher-temperature environments the place a maintenance-free design is most popular. (Relying on the mannequin, bellows couplings can deal with temperatures as much as 300°C and torque as much as 4,000 Nm.)
An elastomer coupling makes use of an elastomer spider between two clamping hubs. As a result of the 2 halves are separable and the elastomer sits between them, it’s extra tolerant of misalignment, provides vibration dampening and may present electrical insulation. The separable development additionally lends itself to plug-in meeting and restore.
Its stiffness will depend on the spider’s Shore hardness however is mostly decrease than that of a bellows coupling, so it could wind up barely like a spring and introduce a small quantity of delay into positioning. Elastomer couplings are sometimes a lower-cost possibility for much less exact continuous-duty purposes, with temperature functionality as much as 120°C and torque capability as much as 2,000 Nm.
GAM presents a variety of servo couplings, together with elastomer and bellows designs in a wide range of sizes. Distance couplings use elastomer or bellows couplings at both finish of a protracted drive shaft to span as much as 20 ft with out exterior bearings, whereas security couplings present adjustable torque settings and single-point 360° re-engagement.
“We now have couplings that may connect to hole shafts,” says Ruggles. “We now have ones which have shrink discs. On our bellows coupling, we are able to do full stainless-steel should you want it for meals or different particular environments. We now have high-speed couplings, that are particularly balanced in order that they will run at a lot increased speeds than our regular catalog couplings. And now we have a big dimension variation, from little couplings the scale of my thumb to massive couplings which might be the scale of a pumpkin. It’s a big number of choices to tune to regardless of the buyer wants for his or her utility.”
Visit GAM to learn more about servo couplings for motion control applications.
The submit How coupling stiffness and misalignment compensation impression servo efficiency appeared first on The Robotic Report.


