
Orbbec affords a spread of cameras for robotic notion, selecting, and navigation. Supply: Orbbec
The robotic on the commerce present flooring appears easy. It glides towards a bin, identifies the item, reaches in, and locations the merchandise precisely the place it must go. The gang nods. Traders take notes. Engineers have fun. Then the robotic ships to its vacation spot, and the world stops behaving just like the demo.
This demo-to-deployment hole stays probably the most persistent challenges in robotics. Machines that carry out fantastically underneath managed situations usually battle with shifting mild, reflective surfaces, clear supplies, transferring individuals, and forklift visitors.
Robots don’t must see like people. Robotic notion must be dependable, task-specific, and measurable underneath actual working situations.
The managed setting drawback
Lab situations usually favor the notion stack. Lighting, object place, and backgrounds are managed, and the robotic is given each benefit. Actual-world environments grant none of those favors. Warehouse flooring, hospital corridors, and manufacturing traces introduce shifting mild, reflective surfaces, transferring individuals, vibration, and materials variation.
Every of those variables can expose a weak point that by no means appeared within the demo. What appears like a planning or manipulation failure might start with sensing, calibration, or poor confidence estimation. A robotic can’t reliably plan round a depth map that’s assured however mistaken.
Conventional 2D cameras stay helpful for recognition, inspection, and monitoring. However a 2D picture doesn’t measure depth. Depth might be inferred from movement, discovered priors, or multi-view geometry, however these estimates usually break when lighting, texture, occlusion, or supplies change.
That is why 3D imaginative and prescient programs, depth cameras, and sensor fusion have develop into central to robotics deployment. Robots want spatial measurements from the bodily world, not smarter guesses from flat photographs.
Depth sensing just isn’t a single know-how
Robotic imaginative and prescient has moved by a number of generations of sensing know-how, every fixing some issues whereas introducing others.
Early robotic imaginative and prescient programs relied closely on 2D cameras paired with extremely structured environments. Meeting-line robots labored with fastened half positions, orientations, and lighting. In lots of circumstances, the intelligence was within the fixture, not the sensor.
Structured light systems undertaking a recognized sample onto a scene and estimate depth by studying how that sample deforms. This strategy can work properly for indoor inspection and measurement. Nevertheless, it may be delicate to ambient mild, movement, reflective or clear surfaces, and interference from different lively emitters.
Stereo imaginative and prescient makes use of two offset cameras to estimate depth. By matching corresponding factors between the 2 photographs, the system estimates disparity and converts it into depth. Passive stereo is determined by texture and light-weight; lively stereo provides infrared projection for low-texture scenes. Stereo systems can scale properly for robotics, however low texture, repetitive patterns, movement blur, occlusion, reflective supplies, and vary trade-offs all matter.
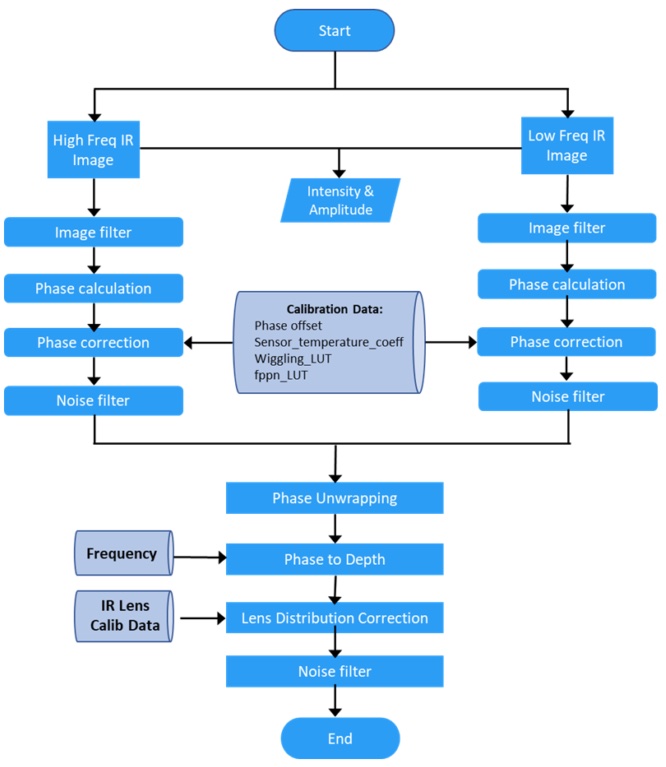
Time-of-flight (ToF) know-how estimates distance from returning infrared mild. ToF cameras might be compact, quick, and helpful for dense depth, however ambient infrared, multipath reflections, reflective surfaces, and vary ambiguity can all distort outcomes.
The sensible conclusion is easy: No sensor class is universally finest. Structured mild, stereo, ToF, lidar, RGB cameras, and inertial measurement items (IMUs) all have helpful roles. The fitting alternative is determined by process, vary, lighting, supplies, movement, compute, security wants, and failure tolerance.
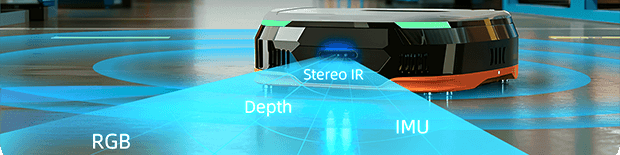
Efficient 3D robotic notion is determined by a spread of sensing applied sciences. Supply: Orbbec
Higher AI helps, however it isn’t an alternative to dependable measurement
It’s tempting to imagine that AI can compensate for sensor limits. AI can considerably enhance robotic notion. It could possibly denoise depth maps, fill gaps, fuse RGB and depth, estimate pose, and observe movement.
AI nonetheless is determined by dependable bodily knowledge. A robotic wants depth estimates which might be appropriate sufficient to behave on. The distinction issues close to individuals, costly items, or equipment.
For deployment, notion wants measurement, uncertainty, validation, and sleek degradation. If a sensor saturates, loses texture, sees by glass, receives multipath reflections, or drifts out of calibration, the system ought to acknowledge decreased confidence fairly than silently passing dangerous geometry downstream.
In robotics, a notion failure that appears assured is usually extra harmful than one which fails visibly.
Robotic notion programs should have sufficient real-world knowledge for certainty. Supply: Orbbec
What real-world deployment really calls for
Deployment is the place the troublesome issues have a tendency to look. A robotic might carry out properly in integration, then fail on lab-missed edge circumstances: black rubber, shiny packaging, clear movie, sunlit doorways, vibration, mud, or overlapping lively depth cameras.
Deployment groups ought to consider notion programs towards the total working envelope. The actual query is whether or not the notion stack can produce dependable spatial data underneath the situations that matter for the duty.
Analysis ought to cowl depth accuracy, latency, calibration drift, compute load, mechanical match and resilience to mud, vibration, and interference. It also needs to check shiny, darkish, clear, metallic, and low-texture surfaces.
Lighting should be handled as a variable, not a background assumption. A system that works underneath managed indoor lighting might behave otherwise underneath direct daylight, blended LED sources, flicker, shadows, or near-infrared interference. Multi-camera operation also needs to be validated, particularly when lively illumination is concerned.
Deployment readiness comes from repeatable efficiency throughout the actual distribution of working situations, together with the inconvenient circumstances that not often seem in a sophisticated demo video.
Cameras and different sensors should be optimized for real-world supplies and environments. Supply: Orbbec
What’s subsequent for machine notion?
The robotics business just isn’t brief on ambition. Humanoid robots, autonomous warehouses, hospital logistics, and manufacturing facility automation all rely upon machines that may understand the bodily world reliably sufficient to behave in it.
The way forward for robotic notion will come from higher depth sensing, sensor fusion, on-line calibration and validation. Stereo systems will continue to improve by stronger matching algorithms and neural processing. ToF programs will profit from higher modulation schemes, multipath mitigation, dynamic vary, and sensor fusion.
Structured mild will stay precious in managed close-range measurement and inspection. RGB, depth, lidar, IMU, tactile sensing, and semantic fashions will more and more work collectively fairly than compete as remoted applied sciences.
Crucial progress could also be much less glamorous than a brand new algorithm: notion programs that know when they’re unsure, degrade gracefully, and expose helpful confidence data to planning and management. Robotic notion wants sufficient accuracy, velocity, and uncertainty consciousness to help the duty.
Making deployment look extra just like the demo begins with constructing notion for the world robots really face, not the world we want they operated in.
 In regards to the writer
In regards to the writer
David Chen holds a Ph.D. in engineering mechanics, specializing in optical measurement programs. He has been creating RGB+Depth cameras since 2009 and, since becoming a member of Orbbec Inc. in 2013, has contributed to the profitable international launch of greater than 10 merchandise.
Orbbec affords merchandise spanning structured mild, stereo imaginative and prescient, ToF, and lidar applied sciences. The corporate mentioned its sensors energy robots and manufacturing, logistics, retail, 3D scanning, healthcare, and health programs.
The submit Why robots nonetheless battle to see the actual world appeared first on The Robotic Report.


