
A section regulator could make AMR administration extra predictable. Supply: VisualNest AI, Adobe Inventory
Predictability is just not stability. In my earlier article, I proposed a priority-based structure geared toward making certain the predictability of autonomous cell robots, or AMRs. Earlier than we focus on section regulation, let’s see the ideas I launched:
- Hierarchies of missions
- Clearly outlined interplay topics
- Context-dependent ranges of decision-making
- Impartial-autonomous standing for authorized predictability
The purpose was structural readability: who makes selections, inside which mission, and beneath which constraints. Nonetheless, structural predictability alone doesn’t assure behavioral stability in actual time. AMRs working in warehouses, hospitals, or procuring facilities repeatedly encounter dynamic environments:
- Sudden look of obstacles
- Sharp improve in human circulation
- Map inconsistencies
- Sensor noise
- Conflicing restoration situations
In such conditions, failure is just not mechanical. It’s computational. Robots freeze. They oscillate between behaviors. They excessively increase the search tree. They exceed acceptable determination latency. This text introduces a management layer designed to manage such instability.
The actual downside: Combinatorial overload
Fashionable autonomous cell robots mix:
- SLAM (simultaneous localization and mapping) or localization filters
- International and native planners (A*, Hybrid A*, RRT*, MPC)
- Conduct bushes
- Restoration mechanisms
- Realized insurance policies
Every part individually is secure. Instability emerges on the degree of their integration. When environmental complexity will increase, planners increase extra nodes. When ambiguity grows, the Conduct Tree switches extra continuously. When impediment maps turn out to be denser, reactive controllers turn out to be extra aggressive.
The end result is just not bodily failure. The result’s computational divergence. It isn’t a defect of a particular algorithm. It emerges when exterior environmental stress and inside battle throughout the management stack improve concurrently.
This corresponds to accelerated structural dynamics of the system – simultaneous amplification of the exterior process gradient (Delta N) and inside behavioral divergence (Delta D). In sensible phrases, this implies accelerated development of computational instability. In actual time this manifests predictably: latency will increase, the processor turns into overloaded, the choice cycle loses determinism. It’s at this stage that meta-level intervention is required – earlier than oscillation or impasse happens.
How you can restrict complexity crowth with out dropping search functionality
In combinatorial experiments with a structural compression mechanism — Combinatorial Compression Engine (CCE) — it was demonstrated that, with correct search group, it’s attainable to considerably cut back the explored search house with out dropping answer validity.
Though these experiments had been performed outdoors a robotics stack, the precept of structural constraint instantly applies to AMR planning: as a substitute of exponential development of options, the system should dynamically restrict search depth and branching.
That is exactly the position of the section regulator described under. Structural compression ideas are applied within the open repository:

Administration of AMRs might be complicated with out section regulators. Supply: ShortFilmStock AI, Adobe Inventory
Two-dynamic behavioral section regulator
A light-weight supervisory layer is proposed, primarily based on two real-time indicators.
ΔN is an exterior process gradient. It displays deviation of the present state from the goal mission equilibrium. For an autonomous cell robotic, Delta N could also be related to:
- Trajectory monitoring error
- Gradient of the native planner price operate
- Charge of change in impediment density
- Progress of localization covariance
- Sensor knowledge novelty
ΔN solutions the query: How strongly does the setting push the system out of its secure state?
ΔD is inside behavioral divergence. It displays battle throughout the decision-making stack. For an AMR, Delta D could correspond to:
- Frequency of habits tree switching
- Frequent activation of restoration branches
- Divergence of other trajectories
- Excessive entropy of motion choice
- Excessive-frequency oscillations of management indicators
ΔD solutions the query: How conflicting is the management course of itself?
Why two parameters? Most techniques monitor both environmental complexity or controller stability. Few monitor each facets — and nearly none regulate their interplay. For aggregation, a easy nonlinear second-order mannequin can be utilized:
I = wN * ΔN + wD * ΔD + okay * ΔN * ΔD
The cross time period displays a essential regime arising from simultaneous development of exterior stress and inside battle. Excessive ΔN alone is manageable. Excessive ΔD alone is correctable. Their mixture types a section boundary of instability.
Part regulation
System state might be mapped into 4 operational zones:
| Zone | ΔN | ΔD | System response |
|---|---|---|---|
| Nominal | Low | Low | Full planning depth |
| Reactive | Excessive | Low | Lowered horizon, reactive precedence |
| Battle | Low | Excessive | Branching limitation |
| Important | Excessive | Excessive | Degraded mode |
The above operational zones are visualized on the ΔN – ΔD section map (Determine 1)
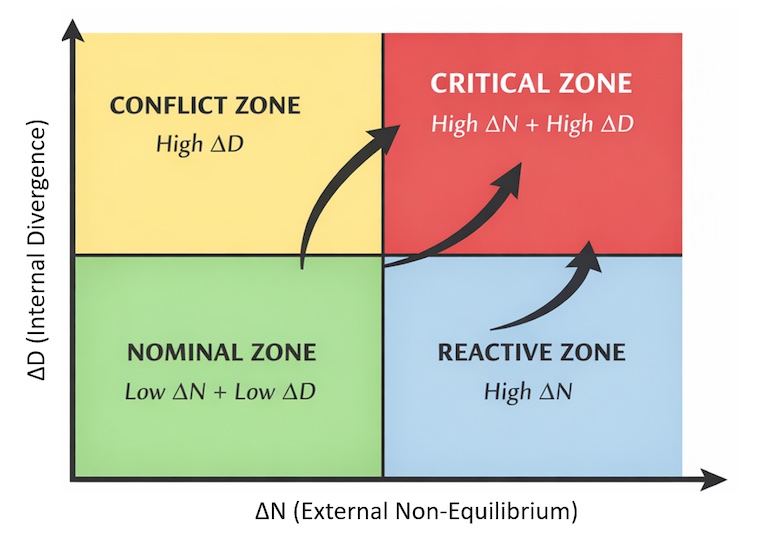
Determine 1. ΔN-ΔD section map of computational stability in AMR techniques.
Determine 1. ΔN-ΔD section map of computational stability in AMR techniques.
ΔN and ΔD might be computed from current diagnostic knowledge. ΔN is a normalized mixture of:
- Trajectory error
- Progress of EKF covariance
- Spinoff of price operate
- Density of dynamic obstacles
ΔD — indicators of inside inconsistency embrace:
- Conduct tree switching frequency
- KL-divergence of other trajectories
- Divergence between international and native plans
- Variance of management indicators
No new sensors are required. The regulator aggregates current indicators right into a secure instability index. This transforms instability detection into lively complexity management.
Integration into the AMR stack
Structure rewriting is just not required. The regulator might be applied as a ROS 2 node:
- Subscription to diagnostic matters
- Computation of ΔN and ΔD (50-100 Hz)
- Publication of instability index
- Dynamic adjustment of planner parameters
Examples of adaptation:
- Discount of max_planning_time
- Limitation of search depth
- Discount of branching issue
- Disabling resource-intensive subtrees
- Switching to simplified native planner
This enables latency to stay inside computational funds whilst environmental complexity grows.
Significance for certification
Within the earlier structure, predictability was structural. With the introduction of the section regulator, predictability turns into dynamic. The system data the instability index, the present operational zone, and the historical past of transitions.
Discount of behavioral complexity and, if crucial, transition to protecting mode are decided by reaching a computable section boundary slightly than by accumulation of errors. This lets you restrict complexity earlier than exceeding latency funds, type loggable standards for transition to protected mode, and create a reproducible evaluation of transition causes.
A system that transitions to protecting mode primarily based on a quantitatively outlined criterion is considerably extra certifiable than an structure counting on heuristic timeouts.
From construction to phase-regulated autonomy
The priority-based structure outlined who makes selections. The section regulator defines when complexity should be restricted. Collectively they supply structural predictability, real-time stability, and controllable computational complexity.
Open environments create combinatorial stress. Managing that stress is the subsequent step towards dependable autonomy.
Sensible suggestions for AMR groups
- In case your robotic freezes in a crowd, measure not solely latency but in addition habits tree switching frequency — that is an indicator of inside divergence (ΔD).
- If restoration habits prompts above an outlined threshold, you might be already within the battle zone. Scale back the planning horizon.
- Progress of impediment density in costmap ought to robotically cut back planning horizon – in any other case development of ΔN will result in exponential branching.
- Log transitions between operational zones. This considerably simplifies security audit.
- Degraded mode should be formally outlined, not triggered by timeout.
A section regulator can forestall robotic failure
AMR techniques don’t fail as a consequence of actuator breakdown. They fail when the choice stack turns into overloaded. The section regulator primarily based on ΔN and ΔD lets you:
- Preserve deterministic latency
- Forestall oscillations
- Ensur predictable degraded modes
- Enhance robustness in actual environments It doesn’t exchange planners. It regulates their complexity.
In dynamic environments, stability is outlined by the system’s capability to handle its personal computational load.
In regards to the creator
Zhengis Tileubay is an unbiased researcher from the Republic of Kazakhstan engaged on points associated to the interplay between people, autonomous techniques, and synthetic intelligence. His work is targeted on creating protected architectures for robotic habits management and proposing new authorized approaches to the standing of autonomous applied sciences.
In the midst of his analysis, Tileubay developed a habits management structure primarily based on a hierarchy of missions and interacting topics. He has additionally proposed the idea of the “neutral-autonomous standing.”
Tileubay has filed a patent software for this structure entitled “Autonomous Robotic Conduct Management System Primarily based on Hierarchies of Missions and Interplay Topics, with Context Consciousness” with the Patent Workplace of the Republic of Kazakhstan. He might be reached at zhenis.tleubay@gmail.com.
The publish Part stability regulator primarily based on two dynamic parameters for autonomous cell robots appeared first on The Robotic Report.


